山木社長Q&A Part2:フォビオン・クワトロセンサーは本当に3600万画素以上の解像度なのか?(その2)
IR:でも、クワトロセンサーは違いますよね。下層の緑と赤は解像度が低いです。受光面積が広くなるのでノイズが減るというのはわかるんですが、どうやって少ない画素数から輝度と色の情報を得ているのか、もう少し説明してもらえますか?
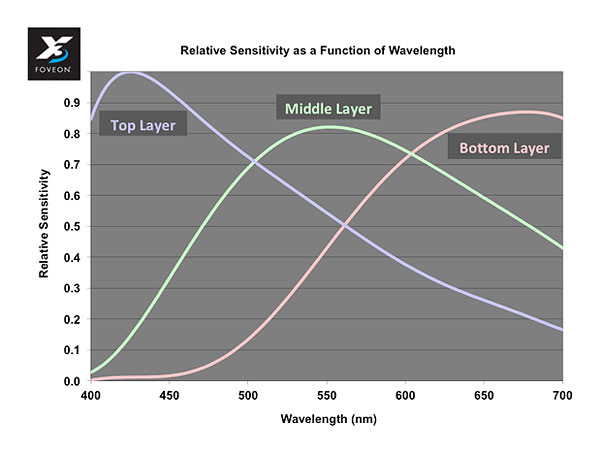
FOVEON:これまでは上から順に赤・緑・青の画素があると説明してきました。しかし、これは事実ではありません。どの画素も、得られる情報は純粋な色ではないのです。しかし、計算によって詳細な情報を得ることが可能になります。他の層との違いを計算することで、一つのピクセルの輝度と色の情報が得られます。これがフォビオンの特徴です。分光特性では、青い曲線が最上部、緑の曲線が中間、赤い曲線が最下層のそれぞれの画素が反応できる光をあらわしています。これで各層の働きがどのようなものなのか、わかると思います。
{kind=link}
フォビオンセンサーでは、どれくらいの深さまでシリコンに浸入するかによって、光を三つに分離します。これまではこの三つを青・緑・赤と呼んでいましたが、図を見ていただければわかるように、全ての層が多かれ少なかれ全ての色に反応しているのがわかると思います。この特性がクワトロセンサーを作る上での鍵でした。
最上部の青層で得られる色は、純粋な青ではなく「青っぽい」色です。同様に中間では緑っぽい、最下層では赤っぽい色が得られます。どれも純色ではありません。このフォビオンセンサーの特性のおかげで、情報を損なわずに実際のデータ量を減らすことができます。全ての層の色が混ざった色だということは、逆に言えば最上部のデータから下層の色のデータが復元できるということです。これはなかなかパッと理解し難いことかもしれませんが、この方法でとてもきれいな絵を作ることができました。
IR:なるほど。全ての層が全ての色の情報を持っているので、それを関連付けることができるのですね。最上層のデータから各ピクセルに赤がどのくらい入っているかわかるので、最下層の赤の割合を逆算して求めることができると。
FOVEON:その通りです。この計算はプログラムで自動的にできるんです。また、このことで、実際必要ではなかった情報を得る必要もなくなります。下層の画素をまとめることで受光面積を広げることができ、結果的にノイズの量も減らすことが可能になりました。
IR:とても面白い考えですね。不必要に大きかったデータを減らすことで処理を高速にし、さらにノイズも減らすことができたと。
FOVEON:この計算を行うには分光特性の情報がとても大事になります。フォビオンは単なる三層構造のセンサーというだけではなく、それぞれの層が幅広い情報を含んでいるんです。
IR:つまり、最上層に青のフィルターを置いているというような単純な話ではないと。
FOVEON:もし各層が純色しか捕捉できなかったら、他の色の情報に関連付けられないので、このセンサーは成立していません。
IR:とても面白いですね。ただ、やはりこの構造に何らかの弊害があるのではないかと思うのですが。全てがうまくいくというのは、にわかに信じがたいです。緑と赤の解像度が低いということはないのでしょうか?フォビオンで偽色が発生することはあまり考えにくいのですが、最終的にどうなったのかが気になります。
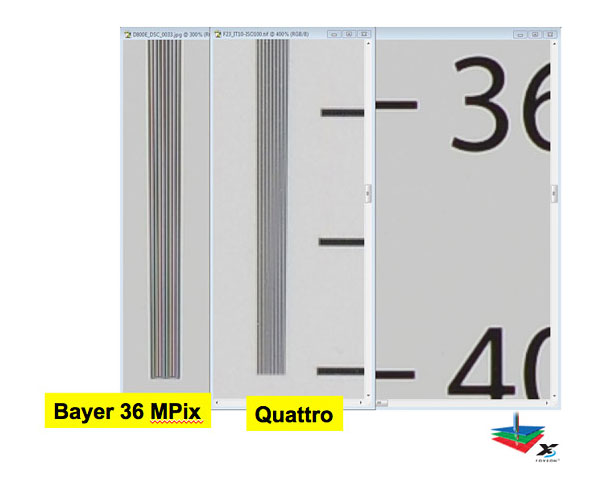
FOVEON:これも山木社長が使うプレゼンの資料なのですが、片方が3600万画素のベイヤーの画像で、もう一つがクワトロのものです。
{kind=link}
これはベイヤー3600万画素と、クワトロセンサーの解像度のテスト画像です。左がベイヤーで右がクワトロですね。どちらもローパスフィルターは付けていません。なので、ローパスなし同士で比較しやすいと思います。画像を見てもらえればわかるのですが、クワトロセンサーは3600万画素のベイヤーを解像度でしのいでいます。
IR:おお、素晴らしいですね。
FOVEON:クワトロの画像はとても綺麗です。これまでのフォビオンと同じ滑らかで高精細な画像を、クワトロでも作ることが出来ました。
IR:けれども、このチャートはモノクロ画像ですよね。
FOVEON:これはカラー画像です。モノクロじゃありません。
IR:ああ、なるほど、カラー画像ですか。被写体がモノクロなんですね。
FOVEON:そうです。被写体がモノクロなので、画像をカラーで生成した時、その違いが明白になります。
FOVEON:もちろん、クワトロでも限界近くで偽解像は出ています。これは避けられません。
IR:偽解像が出るのはしかたないです。でも偽色は出ていない。
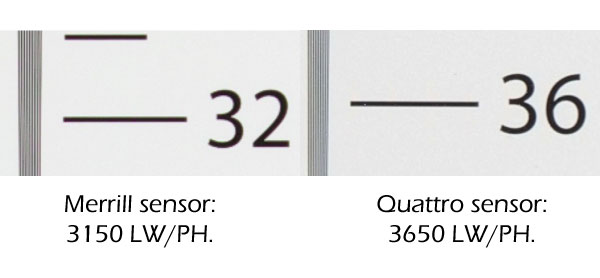
FOVEON:この結果は、私たちが計算した通りのものです。さらにクワトロとメリルセンサーとの比較もあります。これです。
{kind=link}
これは左側がメリルセンサーで、右側がクワトロセンサーの解像度を比較したものです。解像度の数字はフォビオンによるものです。
IR:興味深いです。
FOVEON:最初は理解しづらかったかもしれませんが、この説明でわかってもらえたと思います。クワトロセンサーは間違いなく3900万画素相当の解像度を持ちます。
IR:そうですね。しかもクワトロセンサーには偽色は発生していない。これはきちんと色と解像度が分離されている証拠ですね。
FOVEON:フォビオンに偽色は出ません。
IR:緑と赤の層を大きくすることでノイズ性能が改善されるとのことですが、具体的にクワトロセンサーはどれくらい高感度性能が向上しているのですか?
山木:おおよそ一段分です。
IR:一段ですか?
山木:もちろん、被写体にもよりますが。
IR:そうですね。
山木:平均して一段ということです。
IR:クワトロでは実際の画像サイズが大きくなり、おそらく色や輝度の情報を得るための内部のデータ処理も複雑になっていると思うのですが、クワトロの連写速度はメリルと同じくらいの秒速2コマから3コマくらいになるのですか?。
{kind=link}
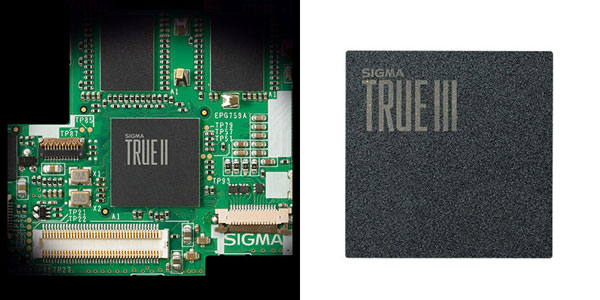
山木:今回は新しい画像処理プロセッサーを使っています。
FOVEON:ああ、TRUE IIIはバージョンの名前なので、三つあるわけではありません。プロセッサーは一つでアナログフロントエンドは四つです。
IR:一つですか。でもより高性能なのですね。
さて、とりあえずこれで聞きたいことは全部聞きました。図やグラフはとても参考になりました。実際にdp2 Quattroを手にするのがとても楽しみです。私たちの研究室にはD800Eもありますから、dp2 Quattroを手に入れたら私たちの設備でテストしたいと思います。長い時間ありがとうございました。